6轴传感器 MPU6050
大约 3 分钟
简介
本章介绍使用Air001开发板驱动MPU6050。
提示
MPU6050使用I²C通信接口,内部整合了三轴MEMS陀螺仪、三轴MEMS加速度计和一个内置温度传感器,可以读取三轴角度,三轴加速度以及当前温度。
硬件准备
按☁️ Air001开发板入门,将
Air001和DAPLink调试器使用排针排母连接。将
MPU6050模块与Air001开发板,按如下表格进行相连:
| MPU6050 | Air001 |
|---|---|
| GND | GND |
| VCC | 3.3V |
| SCL | PF_1 |
| SDA | PF_0 |
提示
剩余的XDA,XCL,ADO,INT引脚不用连接。
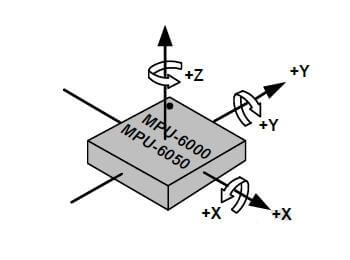
关于MPU6050的方向
- 对于陀螺仪:令芯片表面(有文字的一面)朝上,将其表面文字转至正向自己,以芯片内部中心为原点,水平向右的为X轴正方向,水平指向外侧的为Y轴正方向,竖直向上的为Z轴正方向。
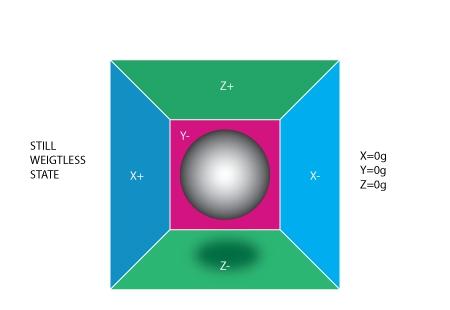
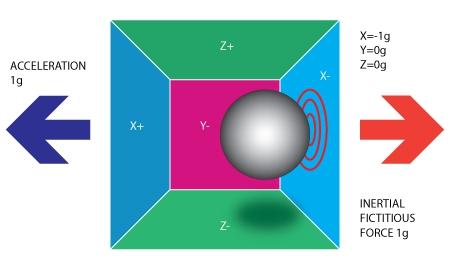
- 对于加速度计: 假想一个不受任何外力作用的球漂浮在正方体盒子中心,此时三轴加速度为0。当小球偏向任何一个方向时,为了保持静止,它自身将具有相反方向的加速度。
软件部分
我们只需要使用Arduino自带的Wire库。
代码如下:
#include<Wire.h>
//定义数组用于存放测量的三轴角度、三轴加速度和温度
int16_t data[7];
//MPU6050的总线地址是0x68
const int mpu_addr =0x68;
//依据加速度计和陀螺仪的量程设定精度
const uint16_t AccelScaleFactor = 16384;
const uint16_t GyroScaleFactor = 131;
提示
- 加速度计的范围有2g、4g、8g、16g可选。
- 陀螺仪的范围有±250、±500、±1000、±2000可选,而对应的精度分别是131LSB/(°/s)、65.5LSB/(°/s)、32.8LSB/(°/s)、16.4 LSB/(°/s)。
定义getData函数来读取MPU6050测量的数据并依次赋给数组data[]。
void getData(){
//开启MPU6050的传输
Wire.beginTransmission(mpu_addr);
//寄存器的地址为0x3b
Wire.write(0x3b);
//结束传输
Wire.endTransmission(false);
//获取7个数据,每个两位
Wire.requestFrom(mpu_addr,14,true);
//赋值
for(byte i=0;i<7;i++) {
data[i] = Wire.read() << 8 | Wire.read();
}
}
在setup函数中添加如下代码:
void setup() {
//设定SCL、SDA引脚
Wire.setSCL(PF_1);
Wire.setSDA(PF_0);
//初始化I²C接口
Wire.begin();
//初始化陀螺仪参数
Wire.beginTransmission(mpu_addr);
Wire.write(0x6B);
Wire.write(0);
Wire.endTransmission(true);
//初始化加速度计参数
Wire.beginTransmission(mpu_addr);
Wire.write(0x1c);
Wire.write(0x08);
Wire.endTransmission(true);
//初始化串口,用于输出日志
Serial.begin(9600);
}
最后在loop函数中添加其余代码:
void loop() {
//声明双精度实型变量三轴加速度,温度,和三轴角度
double Ax, Ay, Az, T, Gx, Gy, Gz;
//引用之前定义的函数读取数据
getData();
//赋值
Ax = (double)data[0]/AccelScaleFactor;
Ay = (double)data[1]/AccelScaleFactor;
Az = (double)data[2]/AccelScaleFactor;
T = (double)data[3]/340+36.53;
Gx = (double)data[4]/GyroScaleFactor;
Gy = (double)data[5]/GyroScaleFactor;
Gz = (double)data[6]/GyroScaleFactor;
//输出三轴加速度
Serial.print(" Ax:"); Serial.print(Ax);Serial.print(",");
Serial.print(" Ay:"); Serial.print(Ay);Serial.print(",");
Serial.print(" Az:"); Serial.print(Az);Serial.print(",");
//输出三轴角度
Serial.print(" Gx:"); Serial.print(Gx);Serial.print(",");
Serial.print(" Gy:"); Serial.print(Gy);Serial.print(",");
Serial.print(" Gz:"); Serial.print(Gz);Serial.print(",");
//输出温度
Serial.print(" T:"); Serial.print(T);
//换行
Serial.print("\r\n");
//延时
delay(50);
}
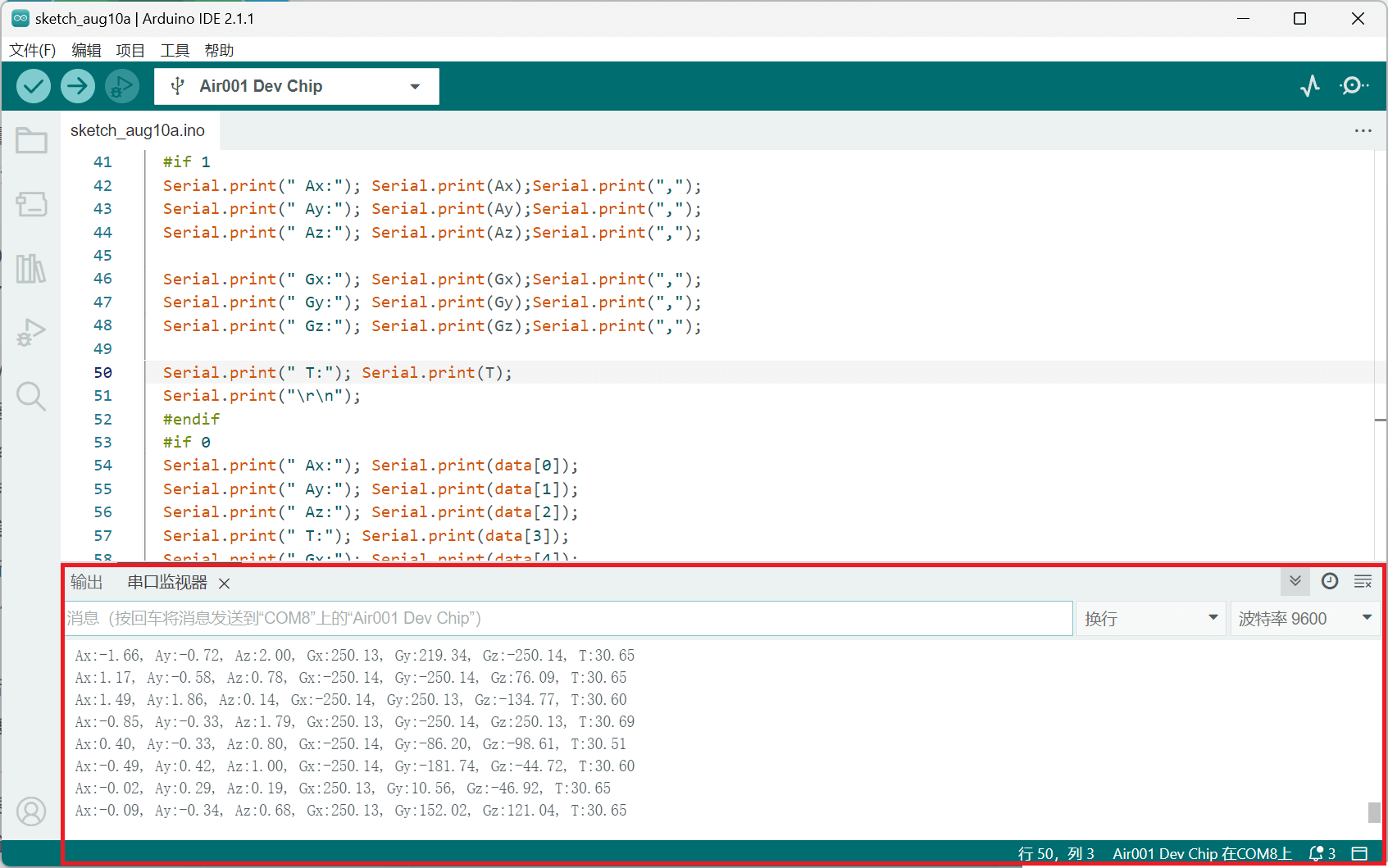
输出结果
在串口监视器中将波特率调至9600,可观察到当前状态和温度,如下图: